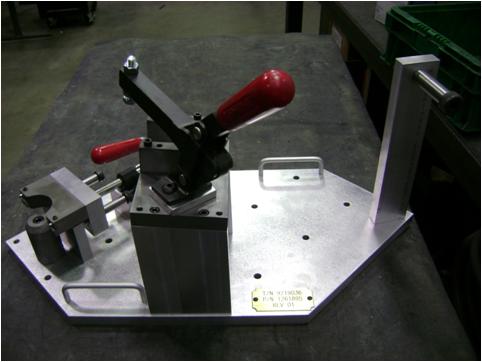
1. A fixture, or “jig”, is any tooling that holds a part in a
consistent location prior to the welding process. Types Include:
a. No clamping
b. Manual Clamping
c. Pneumatic Clamping
d. Hydraulic Clamping
e. Fully Automatic w/ Robotic Interfacing
The type of tooling you choose depends on many factors, all of which
you have control of.
2. Robot Definition:
a. 1 a: a machine that looks like a human being and performs
various complex acts (as walking or talking) of a human being;
also : a similar but fictional machine whose lack of capacity
for human emotions is often emphasized b: an efficient
insensitive person who functions automatically. 2: a device
that automatically performs complicated often repetitive tasks.
3: a mechanism guided by automatic controls. -
http://www.merriam-webster.com
3. Operator Dependent vs. Tooling Functionality
a. Can you depend on the operator to correctly load parts or should
the tooling decide that for the operator
i. Risks include robot crashing, tooling destruction, or
incorrect parts
b. A robot cannot interact with the piece parts as effectively and
efficiently as a human.
4. Capacity of Robot to “Think for Itself”
a. If welding wire is 0.040” in diameter, than the gap between the
parts being joined must not exceed this.
i. Welding wire will pass through and reach fixture
b. A robot can verify that the parts are seated correctly by
“touch sensing”, or a PLC can tell it that all parts are
present. However, this adds considerable cycle time and/or
cost.
consistent location prior to the welding process. Types Include:
a. No clamping
b. Manual Clamping
c. Pneumatic Clamping
d. Hydraulic Clamping
e. Fully Automatic w/ Robotic Interfacing
The type of tooling you choose depends on many factors, all of which
you have control of.
2. Robot Definition:
a. 1 a: a machine that looks like a human being and performs
various complex acts (as walking or talking) of a human being;
also : a similar but fictional machine whose lack of capacity
for human emotions is often emphasized b: an efficient
insensitive person who functions automatically. 2: a device
that automatically performs complicated often repetitive tasks.
3: a mechanism guided by automatic controls. -
http://www.merriam-webster.com
3. Operator Dependent vs. Tooling Functionality
a. Can you depend on the operator to correctly load parts or should
the tooling decide that for the operator
i. Risks include robot crashing, tooling destruction, or
incorrect parts
b. A robot cannot interact with the piece parts as effectively and
efficiently as a human.
4. Capacity of Robot to “Think for Itself”
a. If welding wire is 0.040” in diameter, than the gap between the
parts being joined must not exceed this.
i. Welding wire will pass through and reach fixture
b. A robot can verify that the parts are seated correctly by
“touch sensing”, or a PLC can tell it that all parts are
present. However, this adds considerable cycle time and/or
cost.